
Настройка пид регулятора котла
Обновлено: 02.07.2024
Инструкция по настройке ПИД регулятора
Поскольку количество сочетаний трех параметров, предусмотренных для настройки регуляторов, весьма значительно, с течением времени было разработано много методик, облегчающих их правильную настройку. Некоторые из них требуют определенной дестабилизации технологического процесса, что зачастую неприемлемо на практике. Цель данной статьи – предложить ряд простых правил настройки регуляторов, позволяющих выполнять данную работу с минимальными отклонениями от режимных параметров.
Основное правило: регулятор следует настраивать сообразно технологическому процессу. При высоком быстродействии процесса (например, в контуре расхода), регулятор также следует настроить на быстрое срабатывание. Скорость срабатывания регулятора определяется интегральным временем (интегральной составляющей), а не зоной пропорционального регулирования (усилением). Неправильное использование этих параметров значительно снижает эффективность настройки регуляторов. При низком быстродействии процесса (например, при регулировании температуры на тарелке в верхней части ректификационной колонны) регулятор следует настроить на медленное срабатывание СООБРАЗНО ПРОЦЕССУ. Если у Вас отсутствует информация о характеристиках процесса и не к кому обратиться за разъяснениями, Вам следует перепоручить настройку регуляторов специалисту, который сможет получить необходимую информацию.
Общие правила для стандартных контуров управления
Расход
Обычно более половины контуров управления на установке представляют собой контуры регулирования расхода. Установите интегральную составляющую (I) на 0,1 минуты. Отрегулируйте зону пропорционального регулирования так, чтобы предотвратить излишнюю зашумленность результатов измерения (как правило, около 300%, хотя, в некоторых случаях, при неправильном монтаже узла расходомера, требуемое значение может достигать 1000%). Установка зоны пропорционального регулирования для контура, в котором используется позиционер клапана, в два – три раза превышает значение для контура без позиционера. Для медленно срабатывающих или заедающих регулирующих клапанов может потребоваться установка 0,2 или 0,3 минуты, однако, обычно, такие значения являются исключением. Если эти настройки не работают, проверьте монтаж клапана и первичного измерительного элемента с целью определения неисправности. Устраните неисправность. Не следует устанавливать регулятор на неприемлемое значение интегральной составляющей, например, 10 минут. Если вы считаете, что требуемое значение интегральной составляющей равно 10 минут, следует использовать регулятор в ручном режиме или клапан с ручным приводом.
Примечание: Регуляторы не будут нормально работать, если клапан или другой конечный регулирующий элемент почти полностью закрыт или почти полностью открыт. Настраивать регуляторы в этих условиях не следует. Попросите оператора открыть или закрыть байпас (при наличии байпаса) или дождитесь, пока технологические параметры не изменяться настолько, чтобы клапан вернулся в пределы рабочего диапазона. Предельные значения рабочего диапазона составляют от 5 до 95% рабочего хода, при этом более безопасный диапазон – от 10 до 90%. Не следует использовать воздействие дифференциальной составляющей для контуров регулирования расхода.
Уровень
Давление жидкости
Настройка осуществляется аналогично контурам расхода. Шумы могут быть не столь интенсивными, как при регулировании расхода, и значения зоны пропорционального регулирования, как правило, будут меньше.
Давление газа
Настройка осуществляется аналогично контурам уровня с использованием высокого значения интегральной составляющей. Регулятор, работающий только в пропорциональном режиме, обеспечивает адекватное регулирование, но с определенным изменением контрольной точки в зависимости от состояния процесса по причине пропорционального отклонения. Так как зона пропорционального регулирования может, как правило, оказаться очень небольшой (менее 100% и, нередко, примерно от 5 до 20%), то такое отклонение будет незначительным.
Отрегулировав более 80% контуров стандартной установки, переходим к более труднорегулируемым контурам, а именно: температуре, давлению паров и составу. Сюда же относится температура, на основании которой определяется состав среды во многих колоннах дистилляции.
Труднорегулируемые контуры
Стандартный метод настройки регуляторов
Каскадирование и другие виды взаимодействия контуров управления
Сначала выполните настройку вторичного контура (т.е. расхода) в режиме локальной уставки. Уменьшите интегральную составляющую до минимально допустимого значения. Переключите вторичный контур в режим работы с удаленной уставкой и выполните настройку первичного контура (т.е. уровня). Значение интегральной составляющей первичного регулятора не должно быть меньше помноженного на 4 значения интегральной составляющей вторичного регулятора. Эти же правила применимы и для контуров, взаимодействующих через технологический процесс.
Примером такого взаимодействия через технологический процесс является контур давления в колонне и температурный контур с компенсацией по давлению, используемые для управления ректификационной колонной. Настройте контур давления (который является самым быстрым контуром в данном примере) на минимальную интегральную составляющую, а затем установите интегральное время регулятора температуры, не менее, чем в 4 раза превышающее интегральное время контура давления. Для проверки взаимодействия этих двух контуров при их циклическом срабатывании с аналогичным периодом, переведите один из контуров в ручной режим. Прекращение цикла указывает на возможное наличие проблемы, вызванной взаимодействием. Переместите контуры или используйте описанную выше методику минимизации колебаний.
С дополнительными материалами по настройке ПИД регуляторов Вы можете ознакомиться здесь.
Узнать больше про регуляторы и алгоритмы работы регуляторов Вы можете здесь.
Для закрепления полученных знаний предлагаем Вам воспользоваться программой имитации контуров регулирования Перейти
Применение ПИД-регулятора в системах автоматики
Что такое ПИД-регулятор?

На вход регулятора подаётся измеренная датчиком физическая величина (температура, влажность и т.д.), регулятор в соответствии со своим алгоритмом (реализующим функцию преобразования) выдаёт управляющее воздействие. Это вызывает изменение регулируемой величины (например, температуры или влажности). На следующем шаге регулятор снова делает замер регулируемого параметра и сравнивает эту величину с заданной, вычисляя ошибку регулирования. Новое управляющее воздействие формируется с учётом ошибки регулирования на каждом шаге. Значение величины, которое нужно поддерживать, задаётся пользователем.
Функция преобразования ПИД-регулятора выглядит следующим образом:
В этой формуле, как вы уже догадались, есь три составляющие: интегральная пропорциональная и дифференциальная. Каждая из них имеет соответствующий коэффициент (Кп, Ки, Кд). Чем больше коэффициент, тем больший вклад данная составляющая вносит в работу регулятора. Теперь разберёмся за что отвечает каждая из них.
Тут всё просто. Пропорциональная составляющая просто умножает величину ошибки на свой коэффициент. Например, чем больше заданная температура по сравнению с текущей, тем большую мощность регулятор установит на обогревателе.
ТРМ210: Функциональная схема прибора
Краткий экскурс в теорию закончен, вернёмся к практике и рассмотрим прибор ТРМ210, реализующий данный алгоритм.

Вот его функциональная схема:
Информация с датчика преобразуется прибором с помощью шкалы масштабирования, проходит фильтрацию и коррекцию. Это необходимо, чтоб ПИД-алгоритм получил измеренное значение в удобном и понятном для него виде.
Значение измеренной величины отображается на дисплее прибора.
Пример использования
Настройка ПИД-регулятора
Прибор ТРМ210 имеет функцию автонастройки. В этом режиме регулятор сам имитирует возмущающие воздействия, отслеживает реакцию системы и исходя из этих данных подстраивает свои коэффициенты. Однако, таким способом настроить регулятор получается далеко не всегда, поскольку регулятор ничего не знает о реальной системе, и генерируемые им тестовые возмущения могут не совпадать с реальными возмущениями, возникающими в этой системе. В таких случаях необходимо подобрать коэффициенты вручную. О том, как это правильно сделать мы расскажем в отдельной статье .
Режим ПИД регулирования
В режиме ПИД регулирования достигается более точная установка регулируемой температуры теплоносителя.
Функция актуальна для термостатов, управляющих котлом в релейном режиме. При управлении котлом по цифровой шине, режим ПИД регулирования установлен по умолчанию.
Для применения режима ПИД регулирования подключите к термостату термодатчики воздуха и теплоносителя и укажите их в настройке «Датчики температуры»:

В «Настройках термостата» задайте Режим регулирования « по теплоносителю (ПИД) » и задайте пороговые значения.

ZONT анализирует скорость изменения текущей температуры в помещении относительно заданной, и вычисляет расчетную температуру теплоносителя.
Таким образом, регулирование работы котла осуществляется по показаниям термодатчика теплоносителя и расчётной температуре теплоносителя.
Пример регулирования по воздуху:

При использовании ПИД регулирования достигается более точная установка регулируемой температуры и более ровная температура теплоносителя в батареях. Но котёл при этом может тактовать. Для уменьшения тактования котла следует отрегулировать задержки управления котлом и гистерезис. Гистерезис в случае ПИД регулирования применяется к температуре теплоносителя.
Важно понимать, что для выхода ПИД регулирования в рабочий режим требуется некоторое время (обычно 2-5 часов).
Настройка ПИД регулятора
1. Перевести регулятор в ручной режим, дождаться пока стабилизируется процесс и произвести однократное изменение выходного сигнала (выхода на клапан) X, которое обеспечит приемлемый отклик переменной технологического процесса Y (рисунок.1).
2. После получения отклика вернуться к исходному значению выходного параметра сигнала регулятора. Переменная технологического процесса также должна вернуться к исходному значению. Если различие значительно, повторите попытку отклика.
3. Определить коэффициент усиления процесса (Kp=Y/X), время запаздывания d, и временную константу Т усреднением значений верхнего и нижнего откликов.
4. Рассчитать коэффициенты настройки ПИД регулятора по формулам представленным в таблице 1.
5. Для более устойчивой работы регулятора возможно необходимо будет увеличить временную константу замкнутого контура (E).

Рисунок 1. Отклик процесса на ступенчатое воздействие.

Таблица 1. Формулы вычисления коэффициентов для ПИД регуляторов
Где: Х – значение изменения выходного воздействия (в %);
Y – значение изменения переменной процесса (в % от шкалы);
Kp – коэффициент усиления процесса;
d – время запаздывания реакции процесса (в минутах);
Т – временная константа процесса (в минутах);
E – заданная временная константа замкнутого контура (минуты). Минимально возможное время в течении которого настраиваемый регулятор может привести значение переменной процесса к заданию.
Kp=Y/X
E=T+d
Для более устойчивой работы регулятора значение E нужно увеличить.
При настройке каскадных регуляторов, сначала настраивается ведомый регулятор, затем ведущий регулятор. Причем, временная константа E ведущего регулятора должна быть больше временной константы E ведомого регулятора минимум в 5 раз.
Настройка ПИД регулятора по методу максимального коэффициента усиления (Метод №2).
1. Переключите регулятор в ручной режим работы, когда процесс достаточно стабилен и на установке не ожидается резких отклонений от заданного режима. Установите Td (постоянную дифференцирования регулятора) и K (пропорциональный коэффициент регулятора) в значение равное нулю, а Ti (постоянную интегрирования регулятора) на максимальное значение.
2. Запомните исходное положение клапана на тот случай, если вам потребуется вернуться к нему в процессе настройки. Переключите регулятор в автоматический режим.
3. Постепенно увеличивайте значение пропорционального коэффициента до тех пор, пока не начнутся колебания. Нужно добиться, чтобы колебания были с постоянной амплитудой. Если колебания будут с возрастающей амплитудой, то пропорциональный коэффициент нужно уменьшить. При сильной раскачке необходимо перевести регулятор в ручной режим, выставить запомненное ране в пункте 2 значение выхода на клапан, уменьшить пропорциональный коэффициент и повторить попытку. Когда получатся равномерные колебания, замерьте период колебания tc (время отработки одного полного цикла)(см. рисунок 2). Получившийся пропорциональный коэффициент будет максимальным для данной системы регулирования (Kmax).
4. По полученным tc и Kmax, рассчитать коэффициенты настройки ПИД регулятора по формулам представленным в таблице 2.
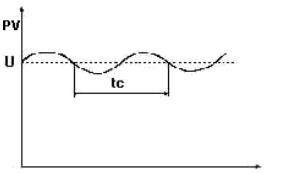
Рисунок 2. Определение периода колебаний

Таблица 2.Формулы вычисления коэффициентов для ПИД регуляторов
Общие правила для настройки регуляторов:
Регулятор не будет нормально работать, если клапан почти полностью закрыт или почти полностью открыт.
Настраивать регулятор нужно в той зоне шкалы, предположительно в которой ему предстоит работать.
Не следует использовать воздействие дифференциальной составляющей для регуляторов расхода.
Не следует использовать малые значения интегральной составляющей в регуляторах уровня.
Не следует использовать воздействие дифференциальной составляющей в регуляторах уровня.
После настройки регулятора, необходимо проверить его устойчивость, сменив значение задания на значительную величину. Если будет наблюдаться раскачка, то необходимо уменьшит коэффициент усиления.
Следует помнить о том, что безопасными для устойчивости регулятора, являются большие значения Ti и малые значения Td.
При зашумленных результатах измерений использование дифференциальной составляющей, как правило, невозможно. Ни в коем случае не устанавливайте дифференциальную составляющую, которая превышает интегральную.
При настройке каскадных регуляторов время интегрирования ведущего регулятора должно быть в 4 раза больше чем время интегрирования ведомого регулятора.
Примечание: После настройки регулятора по методу 1 или методу 2, для более точной работы регулятора можно подстроить его коэффициенты опираясь на рисунок 3.

Рисунок 3. Графики для уточнения настройки регулятора.
С дополнительными материалами по настройке ПИД регуляторов Вы можете ознакомиться здесь.
Узнать больше про регуляторы и алгоритмы работы регуляторов Вы можете здесь.
Для закрепления полученных знаний предлагаем Вам воспользоваться программой имитации контуров регулирования Перейти
Регуляторы
Регулятор, как часть системы автоматического регулирования САР

Примеры внешних возмущающих воздействий:
Расход продукта в трубе (F) зависит от разности давлений P1 и P2. Если изменится хотя бы одно давление, то изменится и расход.
При смешении продуктов температура t зависит от температур t1 и t2 и количества Q1 и Q2 смешиваемых продуктов. При изменении одного из этих параметров приведет к изменению температуры продукта t.
На регулятор приходит два сигнала: заданное значение (от задатчика) и истинное значение (от датчика) регулируемого параметра. Разность этих сигналов называется рассогласованием или отклонением (ε). Регулятор определяет величину рассогласования и в соответствии с заложенным в него алгоритмом (см. Алгоритмы работы регуляторов) вырабатывает управляющее воздействие на регулирующий орган. Регулирующий орган влияет на значение регулируемого параметра (приоткрывая или прикрывая регулирующий клапан, увеличивает или уменьшает значение регулируемого параметра). Кроме этого на значение регулируемого параметра влияют также внешние возмущающие воздействия. Очевидно, необходимость в регулировании возникает вследствие появления внешних возмущающих воздействий, так как при их отсутствии регулируемая величина не изменялась бы.
Следовательно, задача регулирования сводится к устранению отклонения регулируемой величины от требуемого значения при любых внешних возмущениях.
Алгоритмы работы регуляторов
Пропорциональные регуляторы (П-регуляторы) воздействуют на регулирующий орган пропорционально отклонению регулируемой величины от заданного значения
y=kx,
где y – управляющее воздействие регулятора; x – регулируемая величина; k – коэффициент пропорциональности (передачи).
Интегральные регуляторы (И-регуляторы) воздействуют на регулирующий орган пропорционально интегралу от отклонения регулируемой величины
Величина k называется коэффициентом пропорциональности, Ти постоянная времени интегрирования.
Пропорционально – интегральный регулятор (ПИ – регулятор) представляет собой совокупность пропорционального и интегрального регуляторов
Постоянная времени Ти определяет величину составляющей регулирующего воздействия, пропорциональной интегралу от отклонения регулируемой величины x , и численно равна времени удвоения регулятора kx0, т.е. времени, в течении которого первоначальное значение выходной величины регулятора равное , удваивается в следствии действия одной только его интегральной части (рисунок 2)
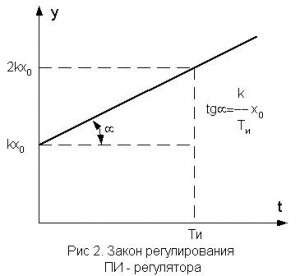
Скорость перемещения исполнительного механизма в ПИ – регуляторе пропорциональна как скорости изменения регулируемой величины, так и самому изменению регулируемой величины.
Если при настройке ПИ – регулятора установить очень большую величину постоянной времени Ти, то он превратится в П – регулятор.
Если при настройке регулятора установить очень малые значения k и Ти, но при этом так, чтобы их отношение k/Ти имело существенную величину, получим И – регулятор с коэффициентом передачи по скорости k/Ти .
Закон регулирования ПИ – регулятора представлен на рисунке 2.
Параметрами настройки ПИ – регулятора являются коэффициент пропорциональности k и постоянная времени интегрирования Ти.
Постоянная времени Тд называется постоянной времени дифференцирования. Она определяет величину составляющей регулирующего воздействия по скорости.
Пропорционально – интегрально – дифференциальные регуляторы (ПИД – регуляторы) воздействуют на регулирующий орган пропорционально отклонению x регулируемой величины, интегралу этого отклонения и скорости изменения регулируемой величины
При скачкообразном изменении регулируемой величины идеальный ПИД – регулятор в начальный момент времени оказывает мгновенное бесконечно большое воздействие на регулирующий орган; затем величина воздействия мгновенно падает до значения, определяемого пропорциональной частью регулятора, после чего, как и в ПИ – регуляторе, постепенно начинает оказывать свое влияние интегральная составляющая регулятора.
Параметрами настройки регулятора являются:
коэффициент пропорциональности регулятора k,
постоянная времени интегрирования Ти,
постоянная времени дифференцирования Тд.
Этот регулятор по возможности настройки является более универсальным по сравнению с другими регуляторами. С его помощью можно осуществлять различные законы регулирования.
Так при Тд=0 и бесконечно большой величине Ти , получаем П – регулятор. При Тд=0, устанавливая достаточно малые значения k и Ти , но так, чтобы отношение значения k /Ти имело существенную величину, получаем И – регулятор. Так при Тд=0 и конечных значениях k и Ти имеем ПИ – регулятор. При бесконечно большой величине Ти и конечных значениях k иТд получаем ПД – регулятор.
Регуляторы по роду используемого сигнала бывают механическими, пневматическими, гидравлическими, электронными.
Механические регуляторы
В механических регуляторах схемы выполнены на рычагах, пружинах и т.п. В большинстве случаев механический регулятор содержит помимо схемы регулятора еще и датчик, и регулирующий орган. Механические регуляторы являются специализированными – предназначены для регулирования только определенного технологического параметра. Так, например регулятором давления нельзя регулировать расход. Механические регуляторы не имеют информационных выходных каналов, поэтому результаты их работы нельзя вывести на компьютер оператора.
Преимущества механических регуляторов
Механические регуляторы не требуют настройки. Механические регуляторы просты в использовании, необходимо только задать необходимое значение технологического параметра, с помощью задатчика (рычажка, вращающейся рукоятки и т.п.). Механические регуляторы достаточно надежны в эксплуатации.
Пневматические регуляторы
В пневматических регуляторах схемы сделаны из мембран, сильфонов и пневматических элементов логики (УСЭППА). Носителем сигнала в пневматических регуляторах является давление воздуха от 0,2 до 1 кгс/см2 . Конструктивно пневматический регулятор представляет из себя устройство имеющее входы для подключения датчика и выход для подключения регулирующего органа. Эти регуляторы так же, как и механические, не имеют информационных выходных каналов и результаты их работы нельзя вывести на компьютер оператора.
Гидравлические регуляторы
Гидравлические регуляторы по принципу работы идентичны пневматическим, только в качестве сигнала используется давление жидкости.
Электронные регуляторы
Алгоритм регулирования схемных регуляторов закладывается в них при создании на заводе и не может быть изменен в ходе эксплуатации.
Простой метод настройки ПИД регулятора

Есть два похода к настройке ПИД регулятора. Первый – синтез регулятора, то есть вычисление параметров регулятора на основании модели системы. Данный метод позволяет очень точно рассчитать параметры регулятора, но он требует основательного погружения в ТАУ.
Второй метод – ручной подбор параметров (коэффициентов). Это метод научного тыка проб и ошибок. Берем готовую систему, меняем один (или сразу несколько коэффициентов) регулятора, включаем регулятор и смотрим за работой системы. В зависимости от того, как ведет себя система с выбранными коэффициентами (недо/пере регулирование) опять меняем коэффициенты и повторяем эксперимент. И т. д. Ну, такой метод имеет право на жизнь, главное представлять как изменение того или иного коэффициента повлияет на систему (что бы не действовать совсем наугад).
Есть более «оптимизированный» метод подбора коэффициентов – метод Зиглера–Никольса.
Сразу скажу, что метод работает не для любой системы, результаты получаются не самыми оптимальными. Но, зато, метод очень простой и годится для базовой настройки регулятора в большинстве систем.
Суть метода состоит в следующем:
1. Выставляем все коэффициенты (Kp, Ki, Kd) в 0.
2. Начинаем постепенно увеличивать значение Kp и следим за реакцией системы. Нам нужно добиться, чтобы в системе начались устойчивые колебания (вызванные перерегулированием). Увеличиваем Kp, пока колебания системы не стабилизируются (перестанут затухать).
3. Запоминаем текущее значение Kp (обозначим его Ku) и замеряем период колебаний системы (Tu).
Все. Теперь используем полученные значения Ku и Tu для расчета всех параметров ПИД регулятора по формулам:
Kp = 0.6 * Ku
Ki = 2 * Kp / Tu
Kd = Kp * Tu / 8
Готово. Для дискретных регуляторов нужно еще учесть период дискретизации – T ( умножить на Ki та Т, разделить Kd на Т).
Еще раз повторюсь, ТАУ изучать нужно, синтез регуляторов рулит, описанный метод годится для базовой настройки, подходит не для всех систем и т. д. Но данный метод очень простой, и вполне годится для «бытового» уровня.
ПИД-регулятор. Методика настройки
2020-07-10 Промышленное 12 комментариев
ПИД-регулятор (пропорционально-интегрально-дифференциальный) — устройство, с обратной связью, применяемое в автоматических системах управления для поддержания заданного значения параметра. Благодаря своей универсальности они широко применяются в различных технологических процессах.

Выходной сигнал регулятора определяется по следующей формуле:
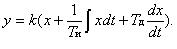
u (t) = P + I + D = Kp e (t) + Ki ∫e (t) dt + Kd de (t)/dt
u (t) – выходной сигнал регулятора;
P – пропорциональная составляющая;
I – интегрирующая составляющая;
D – дифференцирующая составляющая;
Kp - пропорциональный коэффициент
Ki — интегральный коэффициент
Kd – дифференциальный коэффициент
e (t) – ошибка рассогласования
Задачи ПИД-регулятора в системах АСУ ТП
Основная задача ПИД регулятора состоит в поддержании определенного значения параметра технологического процесса на заданном уровне. То есть говоря простым языком, задача ПИД-регулятора заключается в том, чтобы учитывая полученные значения с датчиков (обратная связь) воздействовать на объект управления, плавно подводя регулируемое значение к заданным уставкам. Применение ПИД регуляторов целесообразно, а зачастую и единственно возможно в процессах, где необходима высокая точность переходных процессов, непрерывный контроль и регулирование заданных параметров, недопустимы значительные колебания в системе.
Сравнение ПИД –регулятора с позиционным регулированием
В системах АСУ ТП наибольшее распространение получили два типа регуляторов – двухпозиционный и ПИД.
Двухпозиционный регулятор наиболее простой в использовании и широко распространенный.
Данный тип регулятора сравнивает значение входной величины с заданным параметром уставки. Если значение измеренной величины ниже заданного значения уставки, регулятор включает исполнительное устройство, при превышении заданного значения, исполнительное устройство выключается. Для предотвращения слишком частого срабатывания устройства, в следствии колебаний системы и следовательно изменении значений, задается минимальный и максимальный порог срабатывания — гистерезис, или по другому зона нечувствительности, мертвая зона, дифференциал. Например, нам необходимо поддерживать температуру в 15°С. Если гистерезис задан 2°, то регулятор будет включать нагрев при 14°С и отключать соответственно при 16°С.
Чем меньше значение гистерезиса, тем точнее будет процесс регулирования, но увеличивается частота срабатывания ,что в конечном итоге приводит к износу коммутационных аппаратов. Увеличение гистерезиса уменьшит частоту переключений, но при этом увеличивается амплитуда колебаний регулируемого параметра, что приведет к ухудшению точности регулирования.
Так или иначе, при таком типе регулирования происходят незатухающие колебания, частота и амплитуда которых зависит от параметров системы. Поэтому данный метод обеспечивает хороший результат в системах, обладающих инерционностью и малым запаздыванием. В частности, такой метод широко применяется при регулировании температуры в нагревательных печах.
В отличии от двухпозиционного с помощью ПИД-регулятора удается свести колебания системы к минимуму, благодаря тому, что при таком методе регулирования учитываются различные значения системы — фактическая величина, заданное значение, разность, скорость. Это позволяет стабилизировать систему и добиться повышения точности в десятки раз по сравнению с двухпозиционным методом. Конечно, здесь многое зависит от правильно подобранных коэффициентов ПИД регулятора.
Для того, чтобы правильно выбрать необходимый тип регулятора необходимо хотя бы приблизительно знать характеристики управляемого объекта , требования к точности регулирования, характер возмущений, воздействующих на объект регулирования.
Составляющие ПИД-регулятора
В стандартном ПИД-регуляторе есть три составляющие и каждая из них по своему воздействует на управление.
Пропорциональная — P (t) = Kp * e (t)
Учитывает величину рассогласования заданного значения и фактического. Чем больше отклонения значения, тем больше будет выходной сигнал, то есть пропорциональная составляющая пытается компенсировать эту разницу.
Однако пропорциональный регулятор не способен компенсировать полностью ошибку рассогласования. Всегда будет присутствовать так называемая статическая ошибка, которая равна такому отклонению регулируемой величины, которое обеспечивает выходной сигнал, стабилизирующий выходную величину именно на этом значении. При увеличении коэффициента пропорциональности Kp статическая ошибка уменьшается, но могут возникнуть автоколебания и снижение устойчивости системы.
Интегральная – I (t) = Ki ∫e (t) dt
Интегральная составляющая используется для устранения статической ошибки. Она складывает значение предыдущих ошибок рассогласования и компенсирует их, можно сказать, что учится на предыдущих ошибках. То есть ошибка рассогласования умножается на коэффициент интегрирования и прибавляется к предыдущему значению интегрирующего звена. При выходе системы на заданный режим, интегральная составляющая перестает изменяться и не оказывает какого-либо серьезного воздействия на систему. Физически интегральная составляющая представляет задержку реакции регулятора на изменение величины рассогласования, внося в систему некоторую инерционность, что может быть полезно для управления объектами c большой чувствительностью.
Дифференциальная – D (t) = Kd de (t)/dt
Дифференциальная составляющая учитывает скорость изменения регулируемой величины, противодействуя предполагаемым отклонениям, вызванными возмущениями системы или запаздыванием. И чем больше будет величина отклоняться от заданной, тем сильнее будет противодействие, оказываемое дифференциальной составляющей. То есть она предугадывает поведение системы в будущем. При достижении величины рассогласования постоянного значения дифференциальная составляющая перестает оказывать воздействие на управляющий сигнал.
На практике какая-либо из составляющих может не использоваться (чаще всего Д-дифференциальная) и тогда мы получаем П-регулятор, ПИ-регулятор.
Методика настройки ПИД-регулятора
Выбор алгоритма управления и его настройка является основной задачей в процессе проектирования и последующего удовлетворительного запуска агрегата в промышленную или иную эксплуатацию.
В основе методики лежит закон Циглера-Никольса, являющийся эмпирическим и основанным на использовании данных, полученных экспериментально на реальном объекте.
В результате ознакомления с методикой, а также при близком рассмотрении объектов регулирования, были выбраны формулы и коэффициенты ближе всего подходящие к реальному объекту регулирования.
Объект регулирования – камерная электрическая печь. Число зон регулирования от 24 до 40. Каждая зона есть набор электронагревателей. Материал нагревателей нихром. Тип — проволочные, навитые на керамические трубки.
Требования: поддержание температуры по зонам печи +/- 5С.
МЕТОДИКА:
Настройка пропорциональной компоненты (Xp)
- Перед настройкой зоны пропорциональности интегральная и дифференциальная компоненты отключаются:
- Постоянная интегрирования устанавливается минимально возможной (Ти =0),
- Постоянная дифференцирования минимально возможной (Тд = 0).

Тο — начальная температура в системе;
Тsp — заданная температура (уставка);
∆T — размах колебаний температуры;
∆t — период колебаний температуры.
- Меняем значение пропорциональной составляющей Xp от минимума (0) до момента, пока не появятся устойчивые колебания системы с периодом ∆t.
Система должна находится в постоянном колебательном процессе, притом колебательный процесс незатухающий, где ∆T– характеристика колебания равная значению величины рассогласования (±10С, или как по заданию). Колебания должны быть одинаковы от Тsp.
После получения данной кривой на нашем объекте, засекаем время периода колебаний ʌt – полный период. Данное время есть характеристика системы, оборудования.
3. Используя полученные параметры рассчитываем Ти и Тд.
| Зона пропорциональности | Коэффициент передачи | Постоянная времени интегрирования | Постоянная времени дифференцирования | |
| П-регулятор | 2*PBs | 0.5*Xp | ||
| ПИ-регулятор | 2.2*PBs | 0.45*Xp | 0.83*ʌТ | |
| ПИД-регулятор | 1.67*PBs | 0.6*Xp | 0.5*ʌТ | 0.125*ʌТ |
Цифры в формулах для расчета коэффициентов ПИД-регулирования скорректированы на основе запуска камерной электрической печи в опытно-промышленную эксплуатацию. И конечно в зависимости от типа объекта регулирования могут незначительно меняться.
Вывод
Благодаря достаточно высоким получаемым результатам ПИД-регуляторы нашли широкое применение в системах автоматического управления.
При этом важно подчеркнуть, что настройка ПИД-регулятора является процессом довольно трудоемким и требует определенных знаний и индивидуального подхода для различных объектов управления.
Настройка ПИД-регуляторов: так ли страшен чёрт, как его малюют? Часть 1. Одноконтурная система

Эта статья открывает цикл статей, посвященных автоматизированным способам настройки ПИД-регуляторов в среде Simulink. Сегодня разберемся, как работать с приложением PID Tuner.
Введение
Наиболее популярным типом применяемых в промышленности регуляторов в системах управления замкнутыми системами можно считать ПИД-регуляторы. И если структуру и принцип действия контроллера инженеры помнят еще со студенческой скамьи, то его настройка, т.е. расчет коэффициентов регулятора, до сих пор является проблемой. Существует огромное количество литературы, как зарубежной (например, [1, 2]), так и отечественной (например, [3, 4]), где настройка регуляторов объясняется на достаточно непростом языке теории автоматического управления.
В этой серии статей будут описываться автоматизированные способы настройки ПИД-регуляторов с помощью инструментов среды Simulink, таких как:
- PID Tuner
- Response Optimizer
- Control System Tuner
- Frequency Response Based PID Tuner
- Closed-Loop PID Autotuner
В качестве объекта системы управления будет выступать электропривод на базе двигателя постоянного тока с возбуждением от постоянных магнитов, работающий совместно с редуктором на инерционную нагрузку, со следующими параметрами:
- напряжение питания двигателя, ;
- активное сопротивление обмотки якоря двигателя, ;
- индуктивное сопротивление обмотки якоря двигателя, ;
- коэффициент момента двигателя, ;
- момент инерции ротора двигателя, .
Параметры нагрузки и редуктора:
- момент инерции нагрузки, ;
- передаточное число редуктора, .
Статьи практически не содержат математических формул, однако желательно, чтобы читатель обладал базовыми знаниями в теории автоматического управления, а также имел опыт моделирования в среде Simulink для понимания предлагаемого материала.
Модель системы
Рассмотрим линейную систему управления угловой скоростью следящего электропривода, упрощенная структурная схема которой представлена ниже.

В соответствии с приведенной структурой в среде Simulink была построена модель такой системы.

Модели электропривода (подсистема Electric actuator) и инерционной нагрузки (подсистема Load) созданы с помощью блоков библиотеки физического моделирования Simscape:


Модели электропривода и нагрузки также включают подсистемы датчиков различных физических величин:
- тока, протекающего в обмотке якоря двигателя (подсистема А),

- напряжения на его обмотке (подсистема V),

- угловой скорости объекта управления (подсистема Ω).

Перед настройкой параметров ПИД-регулятора запустим модель на расчет, приняв передаточную функцию регулятора . Результаты моделирования при отработке входного сигнала 150 об/мин показаны ниже.



Из анализа приведенных графиков видно, что:
- выходная координата системы управления не достигает заданного значения, т.е. в системе присутствует статическая ошибка;
- напряжение на обмотках двигателя достигает значения 150 В в начале моделирования, что повлечет за собой выход его из строя вследствие подачи на его обмотку напряжения больше номинального (24 В).
Пусть реакция системы на единичный импульс должна соответствовать следующим требованиям:
- перерегулирование (Overshoot) не более 10%,
- время нарастания (Rise time) менее чем 0.8 с,
- время переходного процесса (Settling time) менее чем 2 с.
Кроме того, регулятор должен ограничивать напряжение, подаваемое на обмотку двигателя, до значения напряжения питания.
Настраиваем контроллер
Настройка параметров регулятора осуществляется с помощью инструмента PID Tuner, который доступен непосредственно в окне параметров блока PID Controller.

Приложение запускается нажатием на кнопку Tune…, расположенную на панели Automated tuning. Стоит отметить, что до выполнения этапа настройки параметров контроллера необходимо выбрать его вид (П, ПИ, ПД и др.), а также его тип (аналоговый или дискретный).
Поскольку одним из требований является ограничение его выходной координаты (напряжения на обмотке двигателя), то следует задать допустимый диапазон напряжений. Для этого:
- Переходим во вкладку Output Saturation.
- Нажимаем на флаговую кнопку Limit output, в результате чего активируются поля для задания верхней (Upper limit) и нижней (Lower limit) границы диапазона выходной величины.
- Устанавливаем границы диапазона.
Корректная работа блока регулятора в составе системы предполагает использования методов, направленных на борьбу с интегральным насыщением. В блоке реализованы два метода: back-calculation и clamping. Подробная информация о данных методах располагается здесь. Выпадающее меню выбора метода расположено на панели Anti-windup.
В рассматриваемом случае запишем значения 24 и -24 в поля Upper limit и Lower limit соответственно, а также используем метод clamping для исключения интегрального насыщения.

Можно заметить, что внешний вид блока регулятора изменился: появился знак насыщения рядом с выходным портом блока.
Далее, приняв все изменения нажатием кнопки Apply, возвращаемся во вкладку Main и нажимаем кнопку Tune…, в результате чего откроется новое окно приложения PIDTuner.

В графической области окна отображаются два переходных процесса: при текущих параметрах регулятора, т.е. для ненастроенного регулятора, и при значениях, подобранных автоматически. Новые значения параметров можно посмотреть, нажав на кнопку Show Parameters, расположенную на панели инструментов. При нажатии на кнопку появятся две таблицы: подобранные параметры регулятора (Controller Parameters) и произведенные оценки характеристик переходного процесса при подобранных параметрах (Performance and Robustness).
Как видно из значений второй таблицы, автоматически рассчитанные коэффициенты регулятора удовлетворяют всем требованиям.

Настройка регулятора завершается нажатием на кнопку с зеленым треугольником, расположенной справа от кнопки Show Parameters, после чего новые значения параметров автоматически изменятся в соответствующих полях в окне настройки параметров блока PID Controller.
Результаты моделирования системы с настроенным регулятором для нескольких входных сигналов показаны ниже. При больших уровнях входных сигналов (голубая линия) система будет работать в режиме с насыщением по напряжению.



Отметим, что инструмент PID Tuner подбирает коэффициенты регулятора по линеаризованной модели, поэтому при переходе к нелинейной модели требуется уточнять его параметры. В этом случае можно воспользоваться приложением Response Optimizer.
Читайте также: